Week 1
Date: 9/13/18 Time: 4:30-6:30pm
Week #: 1
Quick Summary:
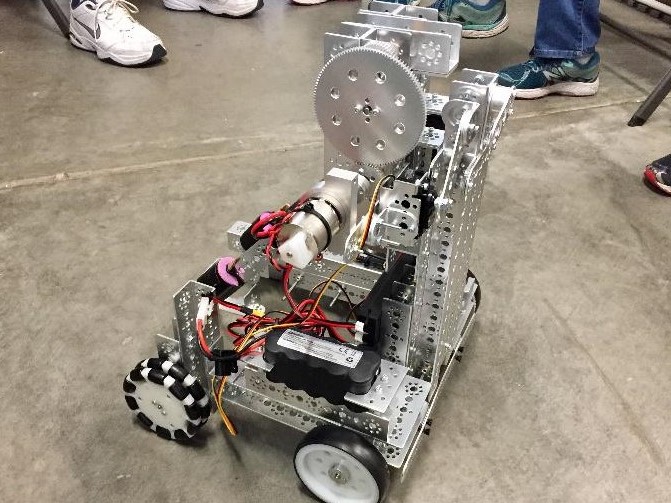
- Our robot has a weak U-framed base.
- We are experimenting with three wheels to see if we can get in the crater.
- Our arm for putting minerals in the lander has a bucket to carry the minerals.
- Our lift is a rope and pulley system, but the rope breaks every few times it lifts the robot.
- The lift system can only lift the robot off the ground if the hook is attached to the lander.
- The gearing system for the arm keeps stripping.
- We have no way to get the minerals off the ground and into the bucket.
- Our robot keeps falling over because the center of gravity is in the back of the robot.
What We Accomplished: Today was our very first class of the season. We met together and talked for a while before getting started on building our robot. We talked about our strategy based on the following questions: Which missions are worth the most points? What is the difficulty level of each mission? How many missions can we get done in two minutes and thirty seconds? How much risk will it take in order to obtain this reward for a certain mission? Is it worth it? We didn’t decide anything yet because we need to read the Rover Ruckus manuals first.
We decided on what each team member’s main responsibility was for right now. Jason is focusing on the robot building part that will mainly be used during the Autonomous period. Luke is focusing on the building part that will mainly be used during the TeleOp period. Titus is doing the programming for the Autonomous period, and Abigail is doing the programming for the TeleOp part of the robot game. Jason and Luke will be working together to build a robot that will work efficiently in both sections of the game. We all will be working a little bit on each part, but the person in charge will make sure it gets completed.
We started building our robot. It has a U-framed base with three wheels on one side and two wheels on the other. We are experimenting with three wheels to see if we can get in the crater with it, but we didn’t put it on both sides because we weren’t sure if we would keep it yet. The front wheel is attached to a motor and a gear, and that gear is attached to a smaller one, which is attached to a big one fastened to the second wheel, which is attached to another small gear, which is attached to the last wheel and big gear. This last wheel is actually two omni wheels put together so that we can maneuver around without having another motor fastened to that wheel. Our arm for putting minerals in the lander is simply a bucket that is attached to two arms, which is powered by a motor attached to a big gear that has an axle through the middle that makes the arm go up and down. The duct-tape on the arms of the arm is so that when we bring the arm up to put minerals in the lander, we don’t smash into it and damage the arms. Our lift lifts the robot off the ground. The hook at the end of the lift is simply just a piece that stuck out to hook onto the lander. And the way we lift off the ground is by a rope and pulley system. Kevlar rope is wrapped around an axle and when the motor turns, we lift off the ground.
Our problems: Our base is very weak because it is like a “U”; the two sides were only connected in the front. The gearing system used to lift the robot worked only on pulling the robot up; we had to rely on gravity to pull us down which proved to be very inconsistent because there was too much friction when the metal pieces slid against each other. This also means that when the hook is not supported by the lander and our robot is on the ground, our lift just falls, which means that we have no way to get it back up at End Game part of the match. The Kevlar rope snapped after a few lifts. Although our arm idea worked well, the gearing system for it did not because the gears kept stripping. Also, we had no way to get the minerals off the ground and into our bucket. In addition to that, we didn’t really have a way to keep the minerals from falling out of the basket until it was over the lander. The only way was to go really fast with the arm, but we realized it still wasn’t a good idea to have the minerals unsupported as they traveled to the hopper. Finally, our center of gravity is very far back because most of the weight was in the back; our robot kept falling over.