Week 18
Date: 1/10/19 Time: 4:30-6:30pm
Week #: 18
Quick Summary:
- We installed the linear-actuator.
- We made our robot flat on the back by adding a square channel to the back, top corners of the robot.
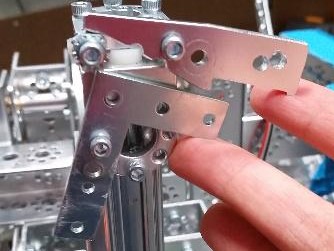
- We made a hook at the top of the linear-actuator.
What We Accomplished: We installed the linear-actuator and it is amazing! It easily slides up and down. We added two green wheels to the back of the robot in order to easily slide on the lander and reduce friction to make it easier for Snazzy. On each top, back corner of the robot we added a square channel that makes the robot flush to the lander. This makes our Autonomous more consistent because we are always starting from the exact same position. We reprogrammed our Autonomous with encoders and our Autonomous is so reliable! Our new hook is very complicated. We have two custom made pieces that are attached to the top of the linear-actuator. An L-shaped piece is on the bottom, and another piece that is grooved is on the top. At the beginning of the match, we hang the robot on the grooved part of the top piece. When the lift lifts, the top piece eventually falls and allows for the robot to unhook itself. When the robot hangs at the end of the match, the lift goes up until the bottom L piece is positioned in the middle of the hook on the lander. Then the lift goes down and the piece gets stuck on the hook, lifting Snazzy off the ground.