Week 19
Date: 1/17/19 Time: 4:30-6:30pm
Week #: 19
Quick Summary:
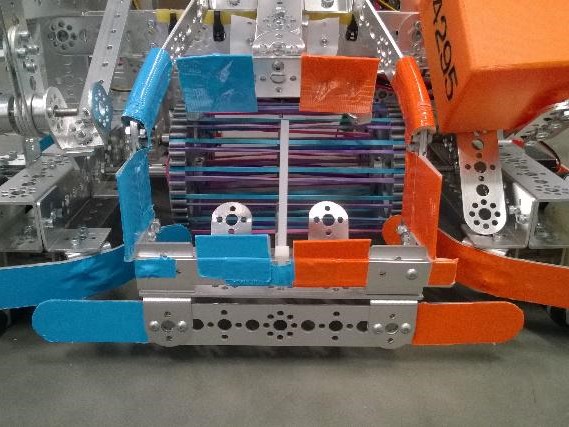
- We updated the hook and bucket.
What We Accomplished: We debriefed on Meet-3 and filled in Luke, who was unable to be present. After discussion, we made a list of goals that we’d like to accomplished before ILT. The first issue we addressed in meeting was the minerals, predominately the gold, often bounce into the incorrect hoppers on the lander. When we slowed the arm motion in attempt to prevent that, minerals fell out of the bucket. To address this issue, we made the “tongue” on the arm bigger and added “walls” to the bucket, keep gold minerals from bouncing out. These additions dramatically improve performance, and minerals now rarely bounce out of the arms bucket. The second issue we addressed involves the climbing hook. On the hook, the bottom “L” piece frequently catches on the lander as the robot drives away. To address this we shaved that piece down to reduce the distance it sticks out towards the lander. Another issue we solved by modifying the hook was our low ground clearance. At the start of a match, in order to benefit from points given to teams that down-climb, robots must be at least 4 inches above the mat. We realized that the distance from the ground to the hook on the landers at the competition where varying, and we consistently where within 1/8 inches of dipping below 4 inches. In order to guarantee our robot is at least 4 inches off the ground no matter the variance of height on the lander, we designed the top piece of the hook to point further down than out. This results in our robot starting the match higher off the ground.
Our Problems: It still takes a while to correctly align the robot when it is hanging on the lander before the start of a match. We have to measure under both wheels, re-adjust, and then measure again. This takes a significant amount of time. An additional problem is that our top hook often slides off the latch on the lander.